Table des matières
Robotique : Thymio, séance découverte
Découverte des modes pré-programmés
Fiches ressources à la fin. Les thymios sont distribués par groupe de 2. Les élèves doivent essayer de comprendre leur fonctionnement. Seul le mode violet (réponse sonore) pose problème. Il faut un environnement relativement calme pour son fonctionnement et non des binômes évoluant côte à côte.











Découverte de VPL
Demander simplement aux élèves de reproduire le mode “Obéissant” via VPL. Puis le mode pisteur.
| Événement : Appui sur une touches de direction | Instruction : Avancer, reculer, … |
Très en main très rapide, pas de soucis particuliers : lancement du programme, chargement des instructions, compilation et envoi du programme au robot/
Etant en wifi, pensez à réaliser des pairages différents pour chaque Thymio afin qu'ils n'interfèrent pas les uns aux autres. [https://www.thymio.org/fr:thymiosettingwireless|Un robot par dongle]
Rapidement, les élèves se rendent compte que ce mode est limité (je parle bien d'un usage en cycle 3) : on ne peut par exemple, par le faire avancer en terme de distances mesurables…





Découverte de Blockly version ASEBA
Pour leur montrer les limites de VPL (enfin on peut le faire sous VPL mais c'est plus compliqué), je leur demande de faire faire à Thymio un carré.
ILs cherchent mais ne trouvent pas de solutions satisfaisantes. Ils me disent qu'avec Scratch, ils y arrivaient et sont un peu déçus.
Je leur propose alors d'utiliser un logiciel de programme de Thymio via des blocs comme Scratch.
Via Aseba Studio, certain ont remarqué qu'il y a avait un bouton “Blockly” et me disent que la solution sera là.
Je ne les contredis pas et leur propose de tester cette hypothèse.
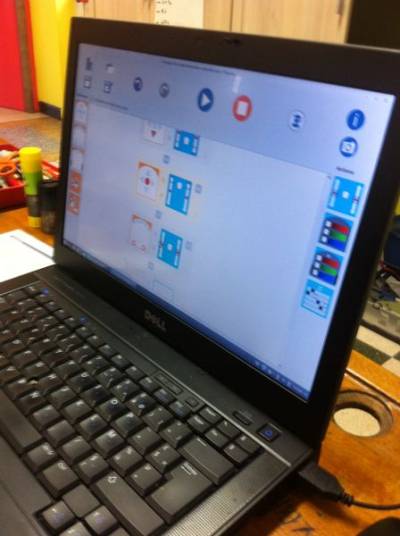
Les premiers retours sont : ça ressemble à Scratch mais ce n'est pas tout à fait pareil. Mais ils trouvent très vite leurs marques et se lancent dans des tests.
J'obtiens rapidement
 |  |
| Le robot démarre bien mais ne s'arrête pas | Le robot ne démarre pas |
Dans le premier cas, effectivement, il n'a rien qui provoque un événement style STOP. Dans le second, le robot démarre mais s'arrête immédiatement.
Je les encourage à persévérer. Ils cherchent, ils finissent par me dire qu'on ne trouve pas d'instruction style “Avance de 10cm”.
C'est un peu compliqué car effectivement, il n'y en a pas. Il faut jouer avec un minuteur…
Je leur montre et, effectivement, ils y parviennent donc, ils ont bien compris qu'on pouvait contourner la contrainte de la mesure du côté du carré par un laps de temps identique à vitesse identique. De plus, l'unité millisecondes est difficile d'approche, mais ça passe quand même.
Finalement, j'arrive plus ou moins à cette production :

Par contre, ils sont déçus, ils n'arrivent pas à le faire tourner simplement ….
Ils ont bien compris qu'il faudra répéter cette action 4 fois mais ils manquent le codage du virage.
Ils me proposent ces 2 algorithmes mais qui ne fonctionnent pas


C'est effectivement compliqué, il faudrait un second minuteur pour gérer le virage…
Je leur dis qu'effectivement, ce n'est pas simple mais comme Thymio est sous open-source, d'autres logiciels sont disponibles et j'introduis Blocky4thymio.